What do you need?¶
Basics¶
To be added (basic Raspberry stuff)
Extra hardware¶
IMU sensors¶
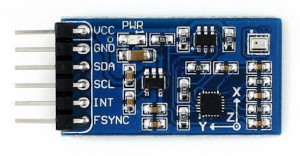
An inertial measurement unit (IMU) is an electronic device that measures and reports a body’s specific force, angular rate, and the orientation of the body, using a combination of accelerometers, gyroscopes, and magnetometers.
IMUs in boats are typically used to get Magnetic Heading, Heel and Trim.
| Wiring: | |
|---|---|
| Configuring: | Pypilot compass calibration. |
Recommended
- InvenSense MPU-9250 single chip.
- InvenSense MPU-9255 single chip.
| Providers: | Pypilot - Waveshare. |
|---|
- ICM-20948 single chip (coming soon).
- ISM330DHCX + LIS3MDL (coming soon).
Also supported
- InvenSense MPU-9150 single chip.
- InvenSense MPU-6050 plus HMC5883 magnetometer on MPU-6050’s aux bus (handled by the MPU-9150 driver).
- InvenSense MPU-6050 gyros + acclerometers. Treated as MPU-9150 without magnetometers.
- STM LSM9DS0 single chip.
- STM LSM9DS1 single chip.
- L3GD20H + LSM303D (optionally with the LPS25H) as used on the Pololu AltIMU-10 v4.
- STM LSM6DS33 + LIS3MDL (optionally with the LPS25H) as used on the Pololu MinIMU-9 v5 and AltIMU-10 v5.
- L3GD20 + LSM303DLHC as used on the Adafruit 9-dof (older version with GD20 gyro).
- L3GD20H + LSM303DLHC (optionally with BMP180) as used on the new Adafruit 10-dof.
- Bosch BMX055 (although magnetometer support is experimental currently).
- Bosch BNO055 IMU with onchip fusion. Note: will not work reliably with Raspberry Pi due to clock-stretching issues.
SDR receivers¶

Software-defined radio (SDR) is a radio communication system where components that have been traditionally implemented in hardware (e.g. mixers, filters, amplifiers, modulators/demodulators, detectors, etc.) are instead implemented by means of software on a personal computer or embedded system.
SDR receivers in boats are typically used to get AIS or weather forecasts.
| Configuring: | SDR-VHF. |
|---|---|
| Providers: | OpenMarine - rtl-sdr.com. |
RS-422 converters¶

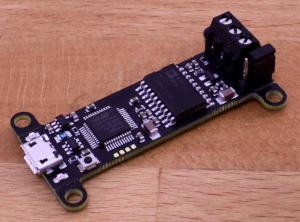
NMEA 0183 communication protocol was designed to run over the RS-422 serial interface, which can support a single talker and up to 10 listeners and data rates as high as 10 mbit/sec.
RS-422 converters in boats are typically used to get or send data to your instruments. You can find USB converters or some Raspberry Pi HAts to connect to the GPIO header.
USB
| Wiring: | Connecting a USB-RS422 converter - Wiring. |
|---|---|
| Configuring: | Connecting a USB-RS422 converter - Input data. |
| Providers: | DTech. |
GPIO
| Wiring: | |
|---|---|
| Configuring: | |
| Providers: |
CAN Bus converters¶
NMEA 2000, abbreviated to NMEA2k or N2K, is compatible with the Controller Area Network (“CAN Bus”) used on road vehicles and fuel engines. Communication runs at 250 kilobits-per-second and allows any sensor to talk to any display unit or other device compatible with NMEA 2000 protocols.
You can find USB converters or some Raspberry Pi HAts to connect to the GPIO header.
USB
| Wiring: | |
|---|---|
| Configuring: | |
| Providers: |
GPIO
| Wiring: | |
|---|---|
| Configuring: | |
| Providers: |