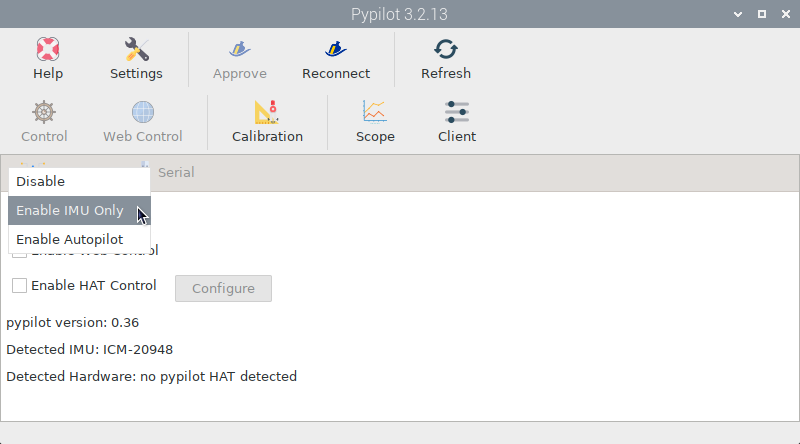
IMU Only mode
Enable this mode in the  Services tab if you are not using a motor controller and are only interested in adding an Inertial Measurement Unit (IMU) for heading, heel and trim data. Pypilot currently supports the following I2C-connected IMU models:
Services tab if you are not using a motor controller and are only interested in adding an Inertial Measurement Unit (IMU) for heading, heel and trim data. Pypilot currently supports the following I2C-connected IMU models:
ICM-20948 (recommended)
MPU-9250
MPU-9255.
The IMU should be automatically detected and displayed in the Services tab:
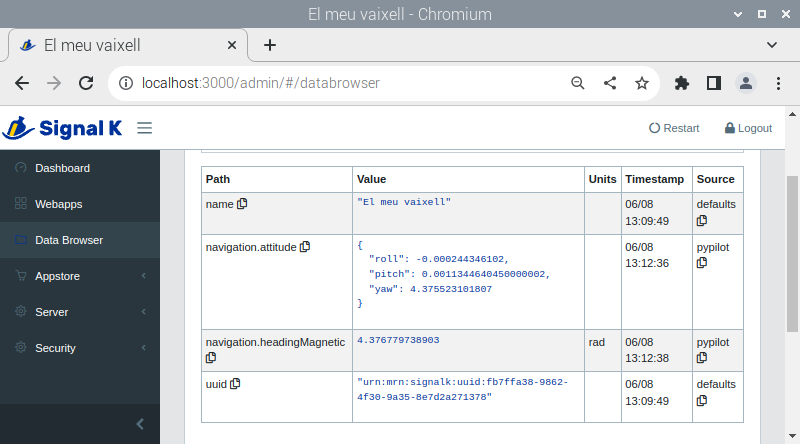
You do not need to do anything else to start receiving heading and attitude data on the Signal K server:
Important
You must  calibrate the IMU before you can obtain reliable heading data.
calibrate the IMU before you can obtain reliable heading data.